Co kryje się za kropką Garmina – cz. 1
Wyższe modele zegarków sportowych z funkcją zapisu dynamiki biegu pozwalają śledzić parametry takie jak czas kontaktu z podłożem, oscylacje pionowe, długość kroku i kadencję. Po treningu można analizować ich przebiegi na wykresach utworzonych z kolorowych kropek. Jednak co tak naprawdę kryje się za tymi kropkami tworzącymi wykres? Okazuje się, że całkiem sporo.
Garmin nie udostępnia swoich algorytmów więc można jedynie szacować i przypuszczać w jaki sposób przetwarza dane dostarczane przez użytkownika. Poniższa analiza jest procesem, który można określić jako reverse engineering. Polega na zrozumieniu jak to działa krok po kroku. To trochę jak odkrywanie tajemnic ukrytych w gotowym produkcie bez dostępu do dokumentacji technicznej i oryginalnych opisów.
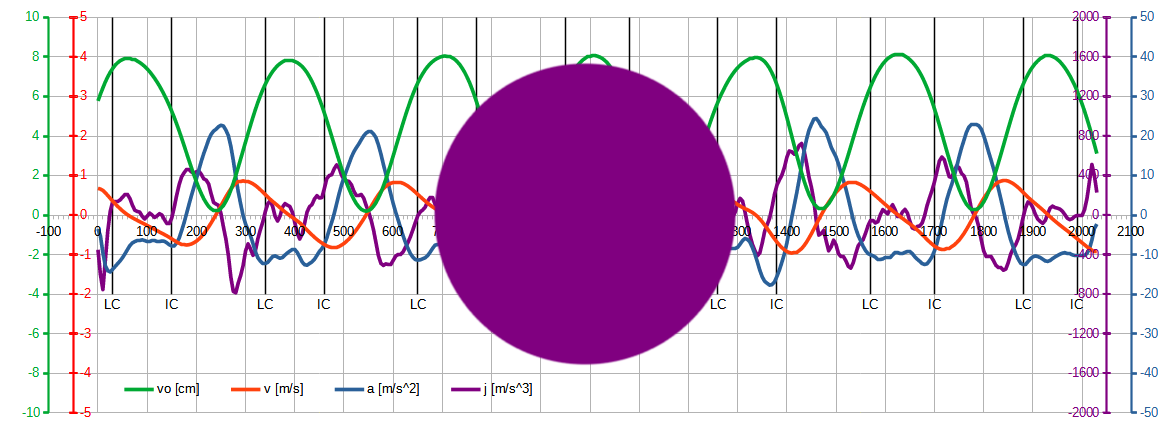
Do analizy posłużył bardzo ciekawy materiał wideo pokazujący bieg zawodnika wyczynowego. Z filmu udało się uzyskać przebieg oscylacji pionowych środka masy (COM) dzięki video tracking, czyli automatycznemu śledzeniu ruchu określonego obiektu w sekwencji obrazów. Pisałem o tym procesie we wpisie: Wizualizacje wartości oscylacji pionowych z wykorzystaniem AI. Poniższy wykres pokazuje przebieg oscylacji pionowych (linia zielona) oraz wyznaczenie na jego podstawie trzech pochodnych. O dwóch pochodnych – prędkości i przyspieszeniu – pisałem już we wpisie: Przebiegi prędkości i przyspieszenia oscylacji pionowych. Tym razem dodaję jeszcze zryw, czyli trzecią, dość tajemniczą pochodną oscylacji pionowych.
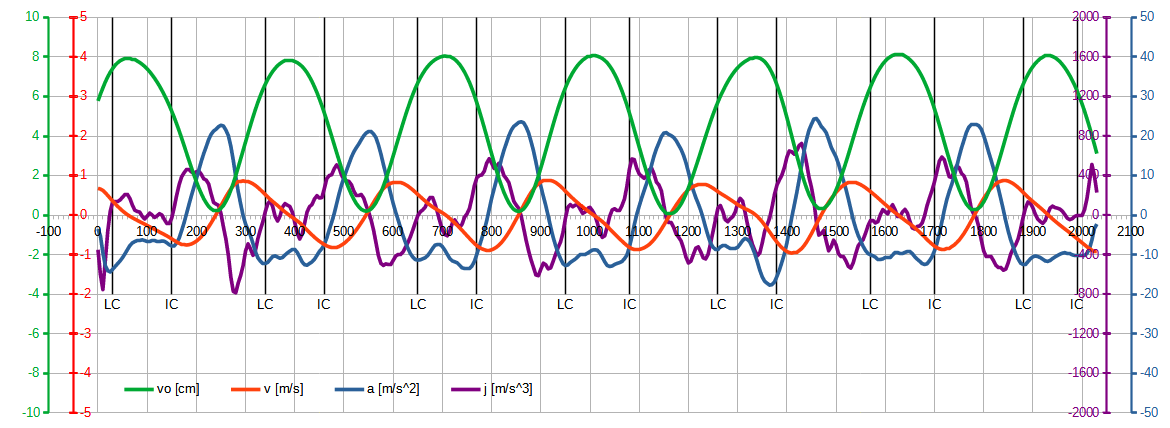
Wykres zawiera 2 sekundy biegu, podczas których zawodnik wykonuje około 6 kroków. Cały ten wykres mógłby więc zostać zredukowany do tytułowej kropki Garmina. To pokazuje jaki potencjał wciąż tkwi w analizie danych o dynamice biegu.
Wstępny opis: zielona linia przypominająca sinusoidę, reprezentuje surowe dane zebrane z trackingu. Pionowa, zielona oś wyskalowana w centymetrach określa przedział oscylacji pionowych od 0 do około 8cm. Pozostałe osie odpowiadają pochodnym z przyporządkowanym do nich kolorem. Pozioma oś czasu jest wyskalowana w milisekundach z podziałką co 10ms, która odpowiada jednej stopklatce z oryginalnego nagrania. Na osi czasu naniesione są momenty pierwszego kontaktu z podłożem (Initial Contact), które oznaczają początek GCT (Ground Contact Time) oraz ostatniego kontaktu z podłożem (Last Contact), które oznaczają koniec GCT. Mamy informacje o średnich wartościach oscylacji (8cm), możemy oszacować średnie tempo biegu (3:04/km). Wiemy. że czujniki IMU (Inertial Measurement Unit) mierzące przyspieszenia i kąty w trakcie biegu, zostały umieszczone na obu piszczelach. Podobne czujniki, działające na tych samych zasadach, znajdują się w zegarku oraz akcesoriach Garmina – pasie HR i PODzie. Czujniki IMU, nad którymi obecnie pracujemy w naszym zespole, również posiadają możliwość wykonywania takich pomiarów.

Wprowadzenie na podstawie okna czasowego w przedziale 400-1000ms (wykres poniżej). Widać tutaj dwie fazy podporu przedzielone fazą lotu. Pierwsza faza podporu między IC w 460ms i LC w 650ms dotyczy prawej nogi i trwa 190ms. Druga faza podporu dla lewej nogi, między IC w 770ms i LC w 950ms trwa 180ms. Dopełnieniem informacji o przedziale jest czas trwania fazy lotu wynoszący 120ms. Możemy więc określić indywidualne GCT dla każdej nogi. Na tej podstawie Garmin oblicza bilans czasu kontaktu z podłożem, ale pomiar bilansu jest możliwy tylko z pasa HR lub PODa. Sam zegarek nie potrafi rozróżnić lewej i prawej nogi, podając jedynie GCT bez bilansu. W jaki sposób pas lub POD określa stronę ciała? IMU mierzy przyspieszenia pionowe, poziome oraz boczne. Prawdopodobnie z tych ostatnich uzyskuje informacje o nodze podporowej. Oprócz tego IMU mierzy kąty, a więc może też rejestrować przechyły i skręty tułowia. Warunkiem jest centralne umiejscowienie czujnika na ciele lub symetryczne rozmieszczenie czujników po lewej i prawej stronie ciała, co pozwala na skuteczny pomiar.
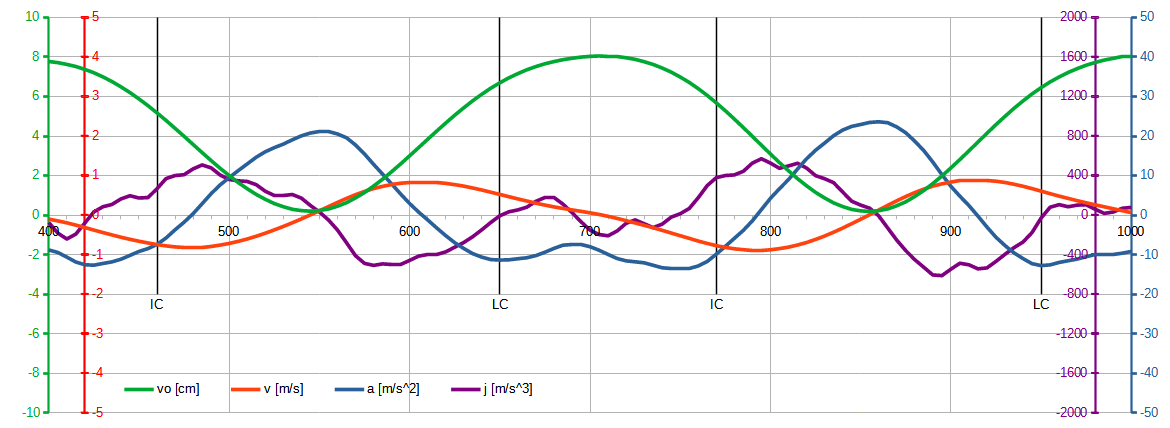
Powyższy fragment wykresu pozwala łatwiej prześledzić przebieg oscylacji pionowych w fazie lotu i podporu oraz określić ich udziały. Przykładowo w przedziale 400-550ms ruch COM w dół, to około 3cm w fazie lotu i 5cm w fazie podporu. Z kolei ruch COM w górę 550-700ms, to blisko 7cm przypadających na fazę podporu i tylko 1cm na fazę lotu. Widać więc wyraźnie, że większość oscylacji pionowych środka masy realizowana jest w fazie podporu. Trzeba podkreślić, że istnieje tu pewien błąd pomiaru wynikający z tego, że oscylacje nie są mierzone bezpośrednio z miednicy tylko z piszczeli. Pomiar VO COM jest więc szacowany w układzie lokalnym na podstawie sygnału z akcelerometru pionowego, przy wsparciu akcelerometru poziomego i żyroskopów. Wykorzystuje się fakt, że sygnał z piszczeli oscyluje wraz z cyklem kroku, ma charakterystyczne wzorce opadania, kontaktu, odbicia i lotu. Musi być więc filtrowany oraz mnożony przez współczynnik kalibracyjny wyznaczany eksperymentalnie i uwzględniający amplitudę oraz przesunięcie fazowe. Wszystko to składa się na ostateczny algorytm, który stanowi autorski pomysł producenta i nie jest podawany do publicznej wiadomości.
Jak dokładne mogą być szacunki? Z zegarka błąd może sięgać powyżej 10%. Z pasa HR i piszczeli będzie dokładniej i to wystarczająco dokładniej. Zwłaszcza jeśli (jak w przypadku Garmina) analiza ogranicza się jedynie do pośredniego wyznaczania szczytu i doliny, czyli wartości maksymalnych i minimalnych VO, bez zagłębiania się w szczegóły przebiegu nachylenia stoków – kontynuując analogię do krajobrazu. Najbardziej wiarygodne pomiary VO COM będą oczywiście z miednicy. Tutaj POD Garmina jest najlepszym rozwiązaniem, ale nic poza tym. Częstotliwość pomiarowa rzędu 0.5-1Hz, którą udostępnia producent jest jak taka wielka fioletowa kropka przysłaniająca całą dynamikę biegu. Może być, ale chciałoby się więcej, a właściwie częściej. Najlepiej jakby użytkownik (trener) miał w opcji tryb laboratoryjny z możliwością pobierania danych z pierwotną częstotliwością 200-400Hz.







