Co kryje się za kropką Garmina – cz. 2
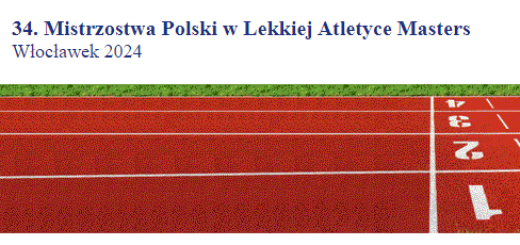
Celem analizy poniższego wykresu jest omówienie relacji czasowych między przebiegami pochodnych pozycji, a nie ustalenie ich bezwzględnych wartości, jak choćby w przypadku zrywu, którego przebieg jest bardzo zależny od częstotliwości próbkowania, filtrowania danych, czy kolejności wykonywania metod obróbki sygnału (co jest typowe dla wyższych pochodnych). Oryginalny materiał filmowy ma częstotliwość 100 klatek/s, co pozwala wyznaczyć wartości prędkości, jednakże z wartościami przyspieszeń, a tym bardziej ze zrywem wiąże się większa niepewność. Oscylacje pionowe (Vertical Oscillations – VO) miednicy nie są mierzone bezpośrednio, lecz metodami pośrednimi z czujników umieszczonych na piszczelach. Wszystko to wpływa na wyznaczane wartości, jednakże typowe wartości prędkości pionowej miednicy obserwowane podczas biegu mieszczą się w przedziale około +/- 1m/s. Przyspieszenia w fazie podporu sięgają 25m/s², a w fazie lotu powinny oscylować wokół -10m/s², odzwierciedlając wpływ jedynie grawitacji na środek masy. Przybliżenia wartości dla pochodnych pozycji są wystarczające, aby móc skupić się wyłącznie na timingu i relacjach między ich przebiegami.
Analiza przedziału 400-500ms.
W 400ms środek masy ciała (Center Of Mass – COM), znajduje się nieco poniżej maksymalnej wysokości 8cm (linia zielona), charakteryzuje się prędkością pionową (linia czerwona) bliską 0m/s, co wskazuje na moment tuż po zmianie kierunku ruchu ze wznoszenia na opadanie. Pod wpływem grawitacji, w fazie lotu trwającej od 400 do 460ms, COM opada o około 3cm, a jego prędkość pionowa staje się coraz bardziej ujemna (zgodnie z przyjętą konwencją dla ruchu w dół, prędkość pionowa będzie miała wartości ujemne), co oznacza przyspieszanie ruchu w dół. Przyspieszenie w tym czasie (linia niebieska) teoretycznie powinno być ujemne i w przybliżeniu stałe, odpowiadając sile grawitacji ~ -10m/s^2. Skoro przyspieszenie nie zmienia się, to jego pochodna czyli zryw (jerk – linia fioletowa) definiowany jako tempo zmiany przyspieszenia w czasie, powinien oscylować wokół zera. Dlaczego w przedziale 400-460ms przyspieszenie nie jest stałe i zryw nie jest zerowy?
Bo to tylko w teoria. W praktyce trajektoria przyspieszenia środka masy jest szacowana na podstawie pomiarów z czujników na piszczelach. Dla fazy podporu trajektorie piszczeli i COM są dość podobne. Jednak podczas fazy lotu, podudzie ma znacznie inną trajektorię. Algorytm uwzględnia te różnice, ale prawdopodobnie nie są one w pełni kompensowane współczynnikami modelującymi ruch COM. Trzeba uwzględnić też inne zachowanie tkanek na piszczeli i na miednicy. IMU umieszczony na miednicy będzie miał bardziej wygładzony przebieg COM ze względu na większą masę i bezwładność tkanek. Dochodzi też szum pomiarowy. Wszystko to będzie wpływać na większe fluktuacje wartości przyspieszenia i prowadzić do niezerowych wartości zrywu w fazie lotu.
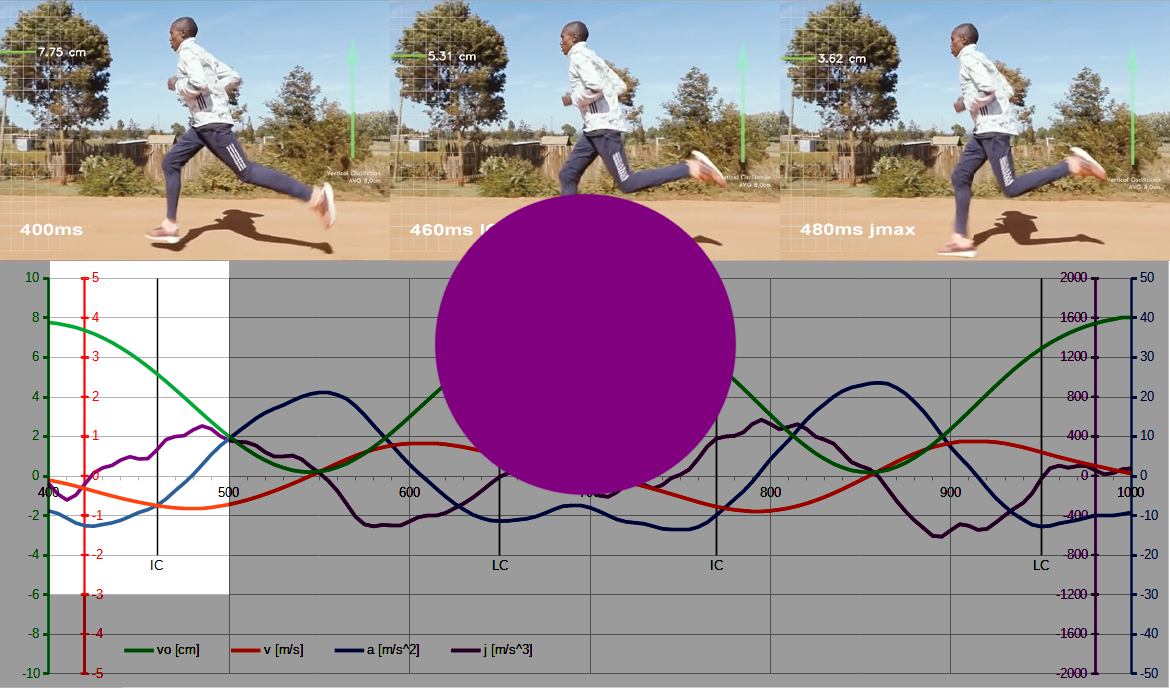
W 460 ms następuje kontakt stopy z podłożem (Initial Contact – IC). Jednak COM nadal porusza się w dół. W przedziale 460-480ms rośnie wartość bezwzględna prędkości pionowej, co oznacza, że COM opada coraz szybciej. Wniosek: IC nie jest początkiem hamowania miednicy. Prędkość i przyspieszenie są ujemne, czyli COM opada szybciej choć z coraz mniejszą dynamiką, gdyż wartość bezwzględna przyspieszenia maleje. Zmniejszanie dynamiki przyspieszania związane jest z pojawieniem się i wzrostem wartości siły reakcji podłoża (Ground Reaction Force – GRF). Obrazem graficznym tempa narastania GRF jest przebieg wartości zrywu od około zera w IC do jmax w 480ms. W przedziale 460-480ms wartości GRF są mniejsze od siły grawitacji, dlatego nie wpływają na zmianę trajektorii COM, który opada o blisko 1.5cm w 480ms.
W okolicy 480ms COM ma największą prędkość opadania. W tym czasie zryw osiąga swoje maksimum. GRF i grawitacja równoważą się. Od tego momentu siła reakcji podłoża zaczyna przeważać nad grawitacją, czyli rozpoczyna się hamowanie ruchu COM. GRF i przyspieszenie rosną, ale z malejącą dynamiką, co odzwierciedla malejący przebieg zrywu od 480 do 500ms. COM opada w analizowanym przedziale o kolejne 1.5cm osiągając VO = 2cm w 500ms.
Warstwa biomechaniczna: tuż przed IC w 460ms mięśnie nogi wykrocznej aktywują się (tzw. pre-activation). Przedział 460-480ms oznacza początek pochłaniania energii kinetycznej w tkankach miękkich i gromadzenia w nich energii potencjalnej sprężystości, ale nie będzie to miało wpływu na ruch miednicy w dół. Dopiero od 480ms (moment uchwycony na stopklatce poniżej) narastająca siła reakcji podłoża zacznie wyhamowywać opadanie miednicy, aż do jej zatrzymania w 550ms i odbicia, czyli zmiany kierunku na wznoszący od 550 do 700ms. Należy pamiętać, że ta analiza jest przeprowadzana w oderwaniu od składowej poziomej siły reakcji podłoża. O ile w fazie podporu, modelowanie ruchu pionowego miednicy, na podstawie odczytów z czujników na piszczelach, wykazuje podobieństwo trajektorii, o tyle w przypadku ruchu poziomego miednicy zakładanie takiego podobieństwa może być błędne.

Warstwa technologiczna: skąd Garmin wie kiedy jest IC, albo max VO? Algorytmy detekcji zdarzeń nie tylko szukają prostych pików przyspieszenia w surowych danych z akcelerometrów (w tym wypadku z akcelerometru mierzącego przyspieszenia pionowe), ale mogą analizować cały kształt sygnału przyspieszenia i jego zmiany charakterystyczne dla uderzenia. Mogą na przykład szukać nagłego wzrostu stromości sygnału (dużej wartości zrywu) jako wczesnego wskaźnika IC, jeszcze przed osiągnięciem maksymalnej amplitudy piku. Stopklatka powyżej interpretowana jest w oryginalnym nagraniu jako IC. Dość późno jak na standardy wizualne. Można by cofnąć się o stopklatkę lub nawet dwie i tam ustalić wizualne IC.
Garmin może wykorzystywać wbudowane modele biomechaniki biegu, które na podstawie ogólnego ruchu i parametrów takich jak wzrost, waga, długość kroku, będą estymować pionowe ruchy miednicy. Dane z akcelerometru służą wtedy do kalibracji i dopasowania tych modeli do konkretnego biegacza i jego aktualnego biegu. Na koniec zostaje jeszcze uczenie maszynowe. Algorytmy mogą być trenowane na obszernych zbiorach danych dostarczanych przez użytkowników. Modele mogą nauczyć się rozpoznawać wzorce w sygnałach akcelerometru, które określają IC, VO i inne parametry. Producent nie udostępnia surowych danych z akcelerometrów, ani algorytmów przeliczeniowych, dlatego można jedynie spekulować na temat jego technologii.