Co kryje się za kropką Garmina – cz. 5
Oscylacje pionowe (Vertical Oscillation – VO), to wysokość na jaką wznosi się środek masy ciała biegacza podczas każdego kroku. Poza metodami optycznymi istnieje możliwość pomiaru oscylacji czujnikami akcelerometrycznymi. Garmin wykorzystuje wbudowane w swoje urządzenia akcelerometry, które rejestrują przyspieszenia w trzech kierunkach: góra–dół, przód–tył i lewo–prawo. Z przebiegu pozycji (zielona linia na wykresie) można oszacować oscylacje pionowe.
Pomiar pojedynczego VO z jednego kroku może być obarczony błędem, dlatego wartości są uśredniane z kilku kroków i wynik zapisywany co jedną lub dwie sekundy. Każdy taki zapis pojawia się potem na wykresie w formie kropki. Kolor kropki odpowiada przedziałowi wysokości, na jaką unosił się środek masy. Przypisana legenda służy jako szybka informacja zwrotna o „jakości” VO. To prosty, intuicyjny sposób na ocenę efektywności biegu według Garmina. Choć jak każde uproszczenie może prowadzić też do problemów interpretacyjnych.
Wyznaczanie VO na wykresie.
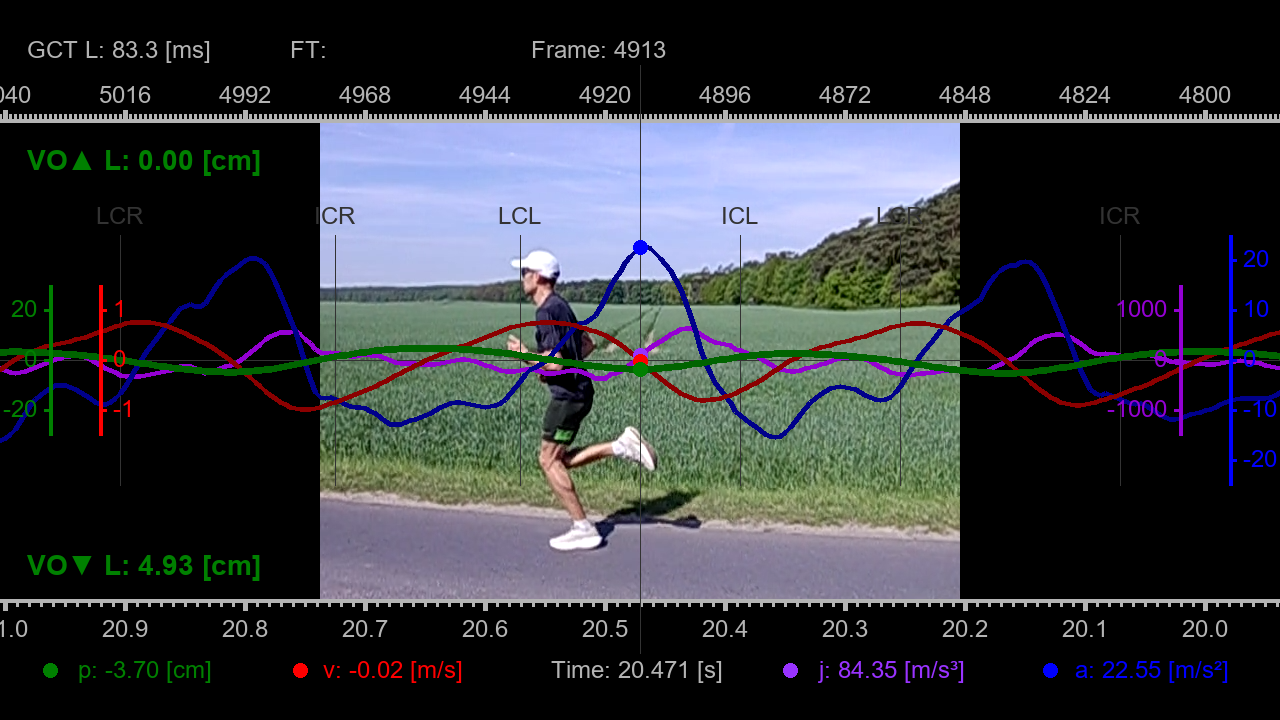
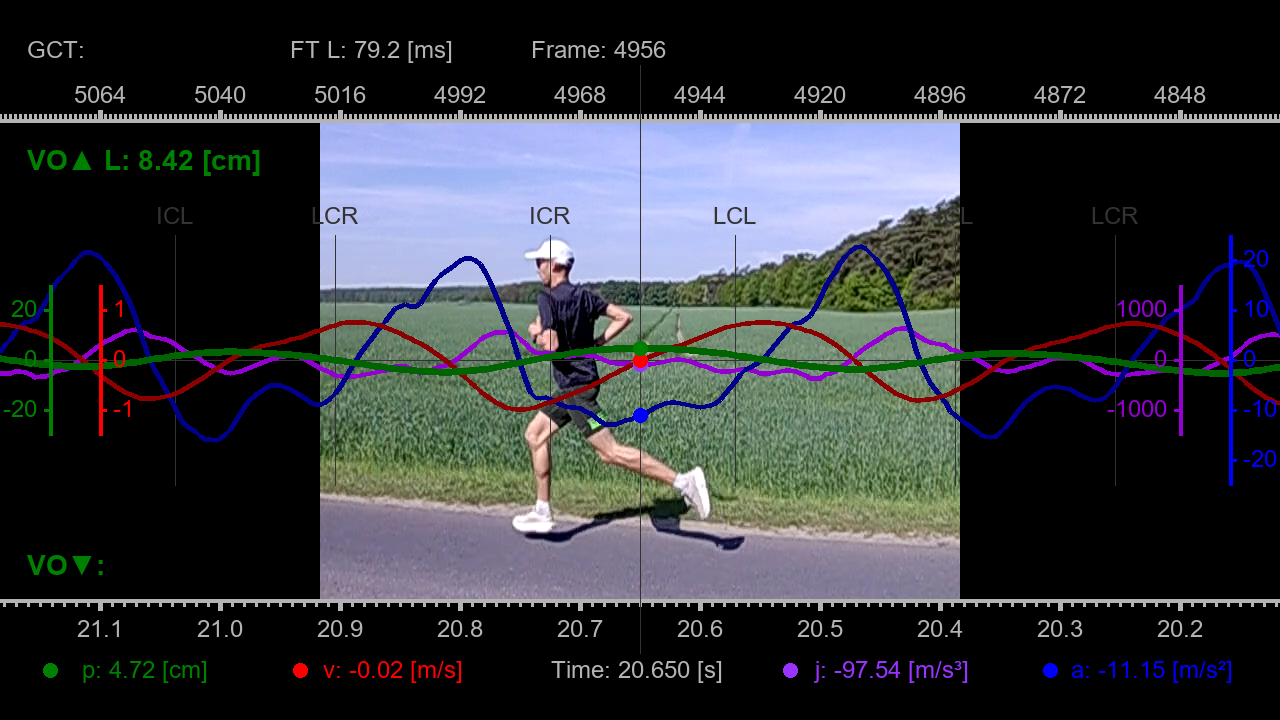
Oscylacje pionowe liczone są dzięki całkowaniu dodatnich i ujemnych przyspieszeń pionowych (niebieska linia na wykresie). Akcelerometr oscyluje wokół zera, które jest punktem odniesienia dla wyznaczania wartości amplitud oscylacji. Stopklatka nr 4913 pokazuje dolne położenie czujnika, które wynosi -3.70 cm (zielony licznik p, w lewym, dolnym rogu wykresu). Stopklatka nr 4956 pokazuje górne położenie czujnika, które wynosi 4.72 cm. Oscylacja wznosząca, to różnica wysokości między tymi pozycjami. W tym przykładzie VO▲ = 8.42 cm.
W panelu roboczym można animować wykres i prześledzić oscylacje dla 12 kroków. Pionowy znacznik pośrodku ekranu wskazuje moment pomiaru wartości pozycji. Ułatwia to identyfikację lokalnych minimów i maksimów VO. W panelu roboczym pokazane jest rozróżnianie na lewą i prawą nogę. Na wykresie, obok zielonej etykiety VO jest litera L, która mówi nam, której nogi dotyczy pomiar. Widać też takie rozróżnienie dla GCT (ground contact time) oraz FT (Fly Time).
Ostatnim, bardzo interesującym parametrem jest VO▼ ze strzałką w dół, czyli oscylacja opadająca. Jest to różnica wysokości między pozycją miednicy w chwili pierwszego kontaktu z podłożem (IC) (stopklatka nr 4974 w panelu roboczym) i najniższym położeniem (stopklatka nr 4995, VO▼= 6.15 cm). Parametr ten można wykorzystać do szacowania pionowej wartości leg spring siffness – LSS, o której pisałem w części trzeciej.
Dzięki takim pomiarom jest możliwość dokładniejszej analizy dynamiki biegu. Można sprawdzić, czy jedna noga ma niższy wznios środka masy, krótszy czas lotu albo dłuższy kontakt z podłożem. Dodatkowo analiza przebiegu prędkości (czerwona linia na wykresie) umożliwia porównanie dynamiki wybicia w pionie i lądowania. Rozdzielenie z podziałem na stronę lewą i prawą, pozwala lepiej zrozumieć asymetrię ruchu, potencjalne źródła kontuzji i optymalizować technikę biegu. Takie dane są na razie niedostępne na wykresach Garmina.
Specjalne podziękowania dla mojego informatyka Marka i robotyka Grześka. Bez ich pomocy ten artykuł by nie powstał.







